Músculo artificial para robôs fica mais seguro e mais barato
Redação do Site Inovação Tecnológica - 30/07/2024

[Imagem: Taekyoung Kim et al. - 10.1002/aisy.202300866]
Músculo artificial barato
Engenheiros desenvolveram um novo músculo artificial macio e flexível que faz os robôs se moverem expandindo-se e contraindo-se, imitando de fato o movimento de um músculo humano.
Para demonstrar o funcionamento desse novo atuador, os pesquisadores utilizaram-no para criar um robô cilíndrico flexível, semelhante a uma cobra, e um bíceps artificial.
O robô cilíndrico navegou pelas curvas apertadas de um ambiente estreito, projetado para imitar uma tubulação, enquanto o bíceps foi capaz de levantar um peso de 500 gramas 5.000 vezes seguidas sem falhar.
Como o corpo desse músculo artificial macio é fabricado por impressão 3D, usando uma borracha comum como matéria-prima, os robôs resultantes custaram cerca de US$ 3 em materiais, excluindo o pequeno motor que aciona a mudança de formato do atuador. Isso contrasta fortemente com os atuadores rígidos tipicamente usados em robótica, que geralmente custam de centenas a milhares de dólares.
E há outras vantagens: Robôs macios e flexíveis são mais seguros e práticos para aplicações do mundo real, sobretudo para a interação com trabalhadores humanos.
"Os roboticistas têm sido motivados por um objetivo de longa data de tornar os robôs mais seguros," disse Ryan Truby, da Universidade Northwestern, nos EUA. "Se um robô macio atingisse uma pessoa, não machucaria tanto quanto ser atingido por um robô rígido e duro. Nosso atuador pode ser usado em robôs que são mais práticos para ambientes centrados no ser humano. E, por serem baratos, poderemos potencialmente usar mais deles de maneiras que, historicamente, têm sido muito proibitivas em termos de custos."

[Imagem: Ryan Truby/Taekyoung Kim/Northwestern University]
Auxéticos de cisalhamento manual
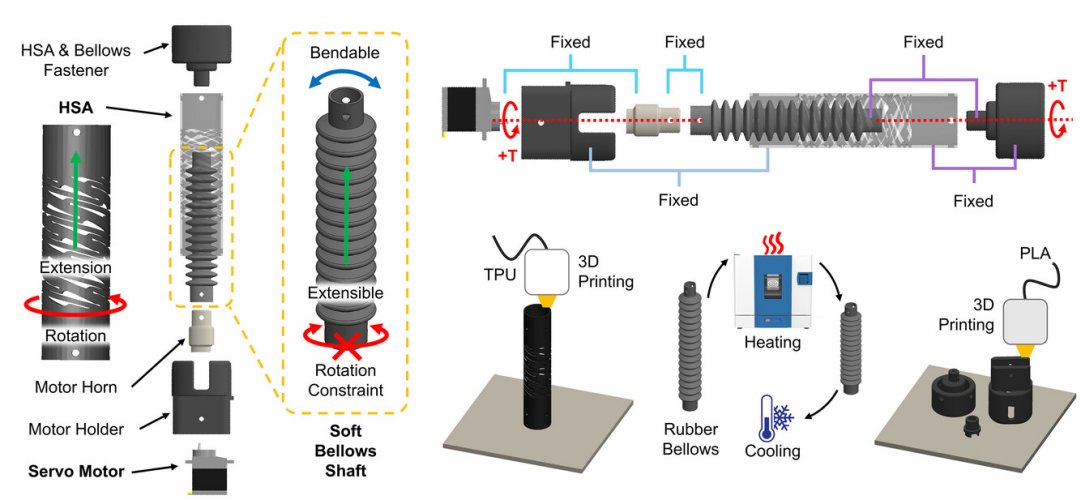
Para desenvolver o novo atuador, a equipe imprimiu em 3D estruturas cilíndricas chamadas "auxéticos de cisalhamento manual", ou HSAs (Handed Shearing Auxetics) de borracha. Difíceis de fabricar, os HSAs incorporam uma estrutura complexa que permite movimentos e propriedades únicas. Por exemplo, quando torcidos, os HSAs se estendem e se expandem. Mas os experimentos com impressão 3D até agora só haviam rendido peças rígidas, que não podiam se dobrar ou deformar-se facilmente.
A equipe começou a superar a deficiência usando poliuretano termoplástico, uma borracha comum frequentemente usada em capas de celulares, o que tornou os HSAs muito mais suaves e flexíveis. Faltava então fazê-los estender e expandir, o que foi obtido adicionando um fole de borracha macio e extensível à estrutura, que funciona como um eixo giratório deformável.
À medida que o motor fornece torque - uma ação que faz um objeto girar - o atuador se estende. Simplesmente girar o motor em uma direção ou outra faz com que o atuador se estenda ou contraia. É de fato um modo muito simples de criar um comportamento tipo muscular usando apenas o giro de um motor.
O fole adicionou suporte suficiente para viabilizar um robô macio e rastejante feito com um único atuador, que se move por conta própria. Os movimentos de empurrar e puxar do atuador impulsionam o robô para frente, o que ficou bem demonstrado no ambiente sinuoso e restrito que simulou um tubo.
"Nosso robô pode fazer esse movimento de extensão usando uma única estrutura," disse o pesquisador Taekyoung Kim. "Isso torna nosso atuador mais útil porque ele pode ser integrado universalmente em todos os tipos de sistemas robóticos."
[Imagem: Taekyoung Kim et al. - 10.1002/aisy.202300866]
Músculo artificial que fica firme
O robô semelhante a uma cobra ficou compacto, com apenas 26 centímetros de comprimento, e rasteja tanto para frente quanto para trás a uma velocidade de pouco mais de 32 centímetros por minuto.
Outro resultado bem-vindo no campo dos músculos artificiais é que tanto o robô quanto o bíceps artificial ficam mais rígidos quando o atuador está totalmente estendido, uma propriedade que os robôs macios anteriores não conseguiram alcançar.
"Como um músculo, esses atuadores suaves realmente enrijecem," disse Truby. "Se você já torceu a tampa de uma jarra, por exemplo, sabe que seus músculos se contraem e ficam mais rígidos para transmitir força. É assim que seus músculos ajudam seu corpo a funcionar. Esse tem sido um recurso negligenciado na robótica macia. Muitos atuadores macios ficam mais moles quando em uso, mas nossos atuadores flexíveis ficam mais rígidos à medida que operam."
Artigo: A Flexible, Architected Soft Robotic Actuator for Motorized Extensional Motion
Autores: Taekyoung Kim, Pranav Kaarthik, Ryan L. Truby
Revista: Advanced Intelligent Systems
Vol.: 2300866
DOI: 10.1002/aisy.202300866






Reinvenção da roda: Inventando uma roda que consegue subir escadas
Refrigeração de estado sólido bate recorde mundial de eficiência
Baterias do tamanho de grãos de poeira para alimentar robôs do tamanho de células
Fibras musculares artificiais elétricas: A nova força dos motores macios
Microrrobôs voarão melhor imitando abertura passiva das asas dos besouros
Tecido ativo inspirado nos tatus pode ser macio ou virar um escudo
Melhor experimento para procurar pela matéria escura não encontra nada
Reinvenção da roda: Inventando uma roda que consegue subir escadas
Revestimento mediterrâneo faz tecidos resfriarem sob o Sol
Nanogeradores multiplicam potência e chegam à casa dos watts
IA calcula com precisão os parâmetros de configuração do Universo
Computação completa com DNA: Nova tecnologia armazena e processa dados
Vem aí mais um semicondutor promissor, e já fabricado em equipamento industrial
Sensor detecta partículas mil vezes menores que comprimento de onda da luz
Refrigeração de estado sólido bate recorde mundial de eficiência
Descoberto campo elétrico fundamental do planeta Terra
Todos os direitos reservados.
É proibida a reprodução total ou parcial, por qualquer meio, sem prévia autorização por escrito.