Folhas magnéticas manipulam objetos sem precisar agarrá-los
Redação do Site Inovação Tecnológica - 16/12/2024
[Imagem: Yinding Chi]
Mover sem pegar
Um dispositivo que combina campos magnéticos e princípios de design de kirigami consegue controlar remotamente o movimento de uma superfície flexível, permitindo manipular objetos sem realmente agarrá-los.
O projeto é criar uma "garra robótica que não agarre", mas que possa levantar e mover objetos frágeis, incluindo géis ou líquidos, e com um adicional: Fazer o trabalho em espaços confinados, onde os braços robóticos comuns ou ferramentas similares não são uma opção.
"Estávamos tentando enfrentar dois desafios aqui," explicou Jie Yin, da Universidade Estadual da Carolina do Norte. "O primeiro desafio foi como mover objetos que você não pode pegar com pinças, como objetos frágeis ou coisas em espaços confinados. O segundo desafio foi como usar um campo magnético para levantar e mover remotamente objetos que não são magnéticos."
Para enfrentar esses desafios, os pesquisadores criaram uma metassuperfície - ele a chamam de "metafolha" - formado por um polímero elástico incorporado com micropartículas magnéticas. O kirigami serviu para criar um padrão, que foi então cortado na folha. As bordas externas da metafolha são fixadas a uma estrutura rígida.
[Imagem: Yinding Chi et al. - 10.1126/sciadv.adr8421]
Movimento magnético
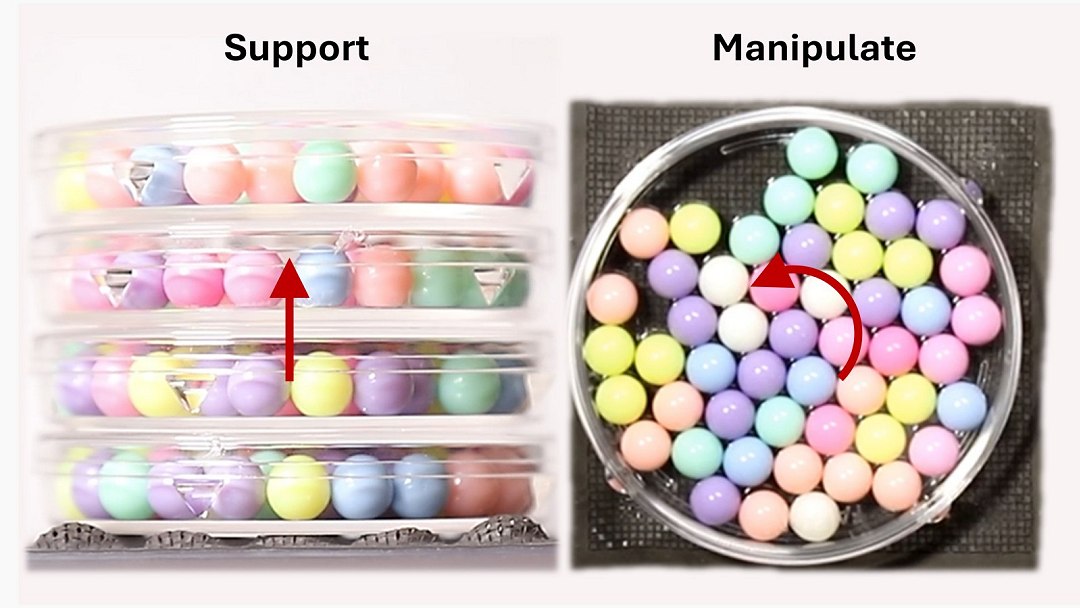
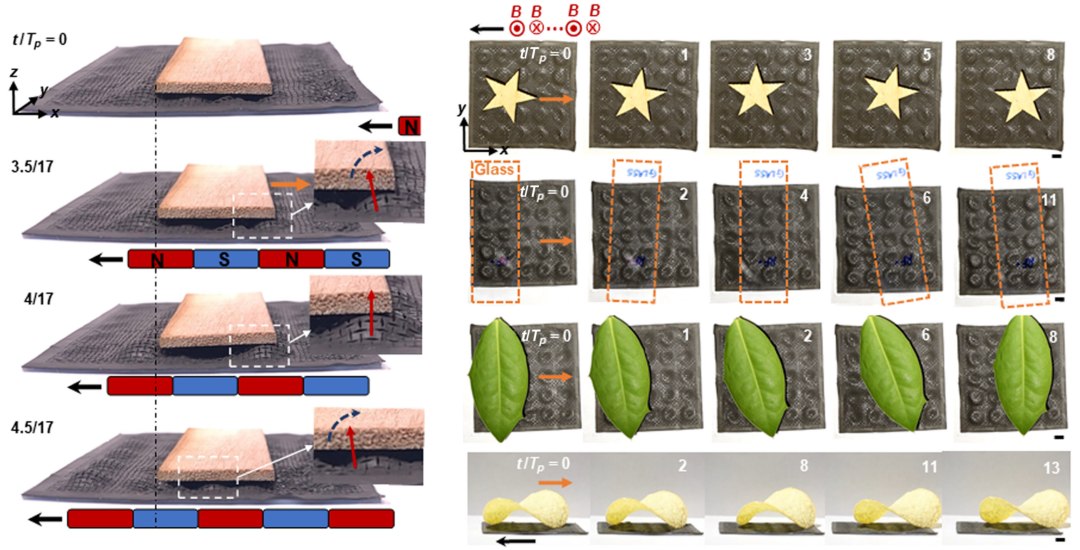
Quando um campo magnético é posto para atuar paralelamente à metafolha, ele é usado para forçar seções da metafolha a se projetarem para cima ou para baixo, criando espécie de caixas de ovos dinâmicas para cima ou para baixo.
"Você pode realmente fazer com que a superfície da metafolha se mova como uma onda controlando a direção do campo magnético," disse Yin. "E ajustar a força do campo magnético determina o quanto a onda sobe ou desce."
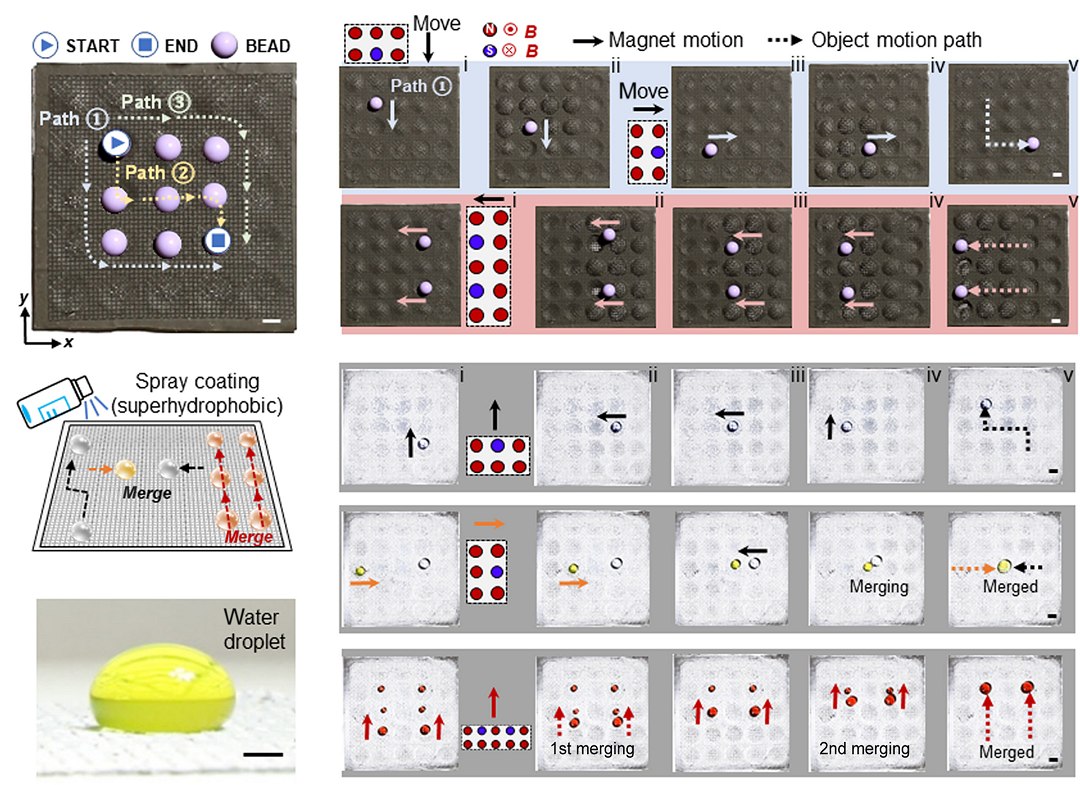
Os testes mostraram que é possível controlar o movimento da superfície de modo suave o suficiente para mover vários tipos de objetos que foram postos em sua superfície, de gotas de líquido a um pedaço plano de vidro sólido.
"O desenho dos cortes na metafolha é um exemplo de kirigami, ou corte de papel," explicou o pesquisador Yinding Chi. "Isso é particularmente importante para as metafolhas, porque o kirigami aumenta a flexibilidade sem sacrificar a rigidez fundamental do próprio material."
O manipulador também é relativamente rápido, com um tempo de resposta ao campo magnético de cerca de dois milissegundos.
[Imagem: Yinding Chi et al. - 10.1126/sciadv.adr8421]
Miniaturização e ampliação
Por enquanto, a equipe está mais interessada em miniaturizar sua metafolha, criando mecanismos para manipular objetos e volumes de líquido na escala micro e até nano.
Mas, a longo prazo, isso poderá significar ganhar uma maior resolução, o que poderá torná-la útil em dispositivos na escala humana.
"Também estamos interessados em como essa abordagem poderia ser usada para criar tecnologias hápticas que possam ter aplicações em tudo, desde jogos até dispositivos de acessibilidade," disse Yin.
Artigo: Magnetic kirigami dome metasheet with high deformability and stiffness for adaptive dynamic shape-shifting and multimodal manipulation
Autores: Yinding Chi, Emily E. Evans, Matthew R. Clary, Fangjie Qi, Haoze Sun, Saarah Niesha Cantú, Catherine M. Capodanno, Joseph B. Tracy, Jie Yin
Revista: Science Advances
Vol.: 10, Issue 49
DOI: 10.1126/sciadv.adr8421





Bateria quântica pode ser carregada sem um campo externo
Observações mais completas do Webb confirmam desafio à teoria cosmológica
Vêm aí a esterilização e a desinfecção a laser
Smart TVs coletam dados do que você está vendo a cada poucos segundos
Processador de luz agora faz todos os cálculos necessários para IA
Processador quântico modular poderá ter qualquer número de qubits
Fotografado novo tipo de magnetismo que pode revolucionar dispositivos digitais
Bateria de diamante e carbono-14 gera energia por milhares de anos
Ordem no caos: Experimento comprova existência de padrões ordenados no caos
Demonstrada ligação entre teoria da informação quântica e física de partículas
Robô-pombo voa como pássaro e elimina a cauda vertical dos aviões
Conheça o robô que irá consertar satélites e montar estruturas no espaço
Robôs ganham olhos de gato para enxergar de dia e de noite
Asas de pássaros inspiram nova abordagem para segurança dos aviões
Robôs controlados por IA têm vulnerabilidades críticas
Rumo aos eletrônicos flexíveis: Placas de circuito impresso ficam totalmente maleáveis
Todos os direitos reservados.
É proibida a reprodução total ou parcial, por qualquer meio, sem prévia autorização por escrito.