Luva robótica controla tremores de pacientes com Parkinson
Redação do Site Inovação Tecnológica - 26/03/2018
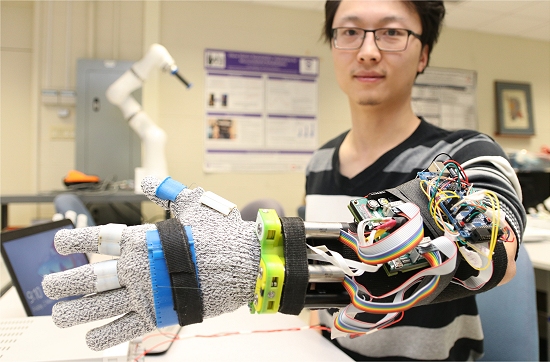
[Imagem: Paul Mayne]
Luva contra tremores
Esta luva robótica foi projetada para atenuar os tremores involuntários típicos de doenças neurológicas, como Parkinson, ou mesmo do envelhecimento natural.
"Se você olhar para alguém com Parkinson que tem tremores, perceberá que a pessoa tem tremores em todo o seu corpo, mas são os dedos que realmente impedem que eles realizem as atividades da vida diária," detalha a pesquisadora Ana Luisa Trejos, da Universidade Ontário Ocidental, no Canadá.
A luva robótica dá firmeza aos dedos, mas não impede os movimentos: Em vez de tentar reprimir os tremores, o aparelho rastreia o movimento voluntário; quando a pessoa tenta executar uma determinada tarefa, a luva acompanha a ação, minimizando os efeitos do tremor.
"Nossas luvas não suprimem todos os movimentos, que é o que a maioria dos sistemas de tecnologia de vestir fazem. Esses dispositivos realmente impedem que eles executem a ação que estão tentando executar e as pessoas têm que agir contra isso," compara Trejos. "Nossas luvas na verdade permitem que o movimento voluntário ocorra e, ao mesmo tempo, evita que o tremor ocorra."
Para isso, cada luva precisa ser customizada não apenas para cada paciente, mas para cada uma das mãos do paciente.
A luva propriamente dita pesa apenas 129 gramas e todo o sistema é alimentado por um único motor de corrente contínua de 2 watts, permitindo que uma bateria seja suficiente para um longo tempo de operação.
Com o sucesso no desenvolvimento da parte eletrônica e do software, a equipe agora pretende miniaturizar o equipamento para torná-lo mais fácil de ser incorporado no dia a dia das pessoas.
Artigo: Design and validation of a novel mechatronic transmission system for a wearable tremor suppression device
Autores: Yue Zhou, Michael D. Naish, Mary E. Jenkins, Ana Luisa Trejos
Revista: Robotics and Autonomous Systems
Vol.: 91, pp. 38-48
DOI: 10.1016/j.robot.2016.12.009






Metafluidos: Vêm aí os líquidos inteligentes
Madeira interativa entende e informa tudo o que acontece sobre ela
Você não precisa de cola para unir materiais - eletricidade basta
Lançada tecnologia de código aberto para interface com neurônios vivos
Células vivas são controladas eletronicamente em tempo real
Olhos de insetos ajustáveis e duráveis feitos com lentes microscópicas
Célula solar atinge 190% de eficiência quântica
Chipset inovador para internet das coisas é apresentado pela USP
Bateria de ferro totalmente líquida armazena energias renováveis
Intel apresenta maior computador neuromórfico inspirado no cérebro
Levitação magnética poderá viabilizar tecnologias antigravitacionais?
Criados bits quânticos que mantém dados à temperatura ambiente
Bateria de íons de sódio recarrega em segundos
Melhor rota para naves espaciais é traçada com teoria dos nós
Único no mundo, chip que funciona com luz é lançado industrialmente
Revolucionário: Luz gera magnetismo em material isolante
Todos os direitos reservados.
É proibida a reprodução total ou parcial, por qualquer meio, sem prévia autorização por escrito.